通讯:13983250545
微信:ycsh638
QQ:469764481邮箱:ycsh6318@163.com
一种监测集鱼一体化仿生机器鱼设计
一种监测集鱼一体化仿生机器鱼设计
吴清云,谢辰旻,林志豪,张新月,毋鑫鹏
(1.上海海洋大学工程学院,上海 201306;2.上海海洋大学海洋文化与法律学院,上海 201306;3.上海海洋大学信息学院,上海 201306;4.上海海洋大学经济管理学院,上海 201306;5.上海海洋大学海洋科学学院,上海 201306)
我国是水产养殖大国,养殖产量位居世界第一。仿生机器鱼的投入使用将为水产养殖行业带来新的血液与运作监管模式。相较于传统水产养殖行业,其具有高度机械化、自动化的特点,符合新时代水产养殖行业的发展需求。
在水产养殖领域中,研究者除了聚焦水下机器人的制作、养殖水质的监测;还通过搭载摄像头、传感器等设备,监控鱼群状态、水温、pH值和溶氧量,不断发展的设备为水下环境的观测与水环境监测提供了方便。国内外许多研究表明,当前水质监测行业中存在设备功能单一的问题,如Karimanzira等为水下机器人装备了导电率、溶解氧传感器,实现了大范围水质监测与水下巡航,但无法与鱼群状态进行匹配;张金泉等设计了一种搭载了视频监控系统的框架式无缆水下机器人,但框架式的设计缺乏灵活性,同时会惊扰鱼群。总体缺乏能够不惊扰鱼群的水质监测设备与鱼群视觉监测装置来科学化地监测水产养殖情况。
现设计的仿生机器鱼基于多传感器技术和自主巡航技术,能够实现鱼群视觉监测和水质数据采集,将采集到的数据与当前鱼群生长状态相匹配,进行多维度监测。该机器鱼创新性地将水质监测和视觉监测融为一体,具有一定的先进性。
1 系统架构及工作原理
现设计的仿生机器鱼,是将LED集鱼灯与仿生鱼特性相结合的水质监测与水下鱼群观测设备。产品仿生了鲹科鱼类,胸鳍由左右两舵机驱动,鱼体部分与鱼尾由三弹簧进行连接,弹簧的压缩伸长由单独驱动单元控制以实现方向改变,渲染图见图1。装置底部设有2个绿色LED集鱼灯,而摄像头位于鱼头处,分布在鱼头两侧,能够获得最大范围视野,减少水下航行的盲区。头部设有入水式水质监测传感器,流水由腮处开孔流出。鱼体内部则采用模块化设计,彼此相隔,以方便模块故障的排查等。
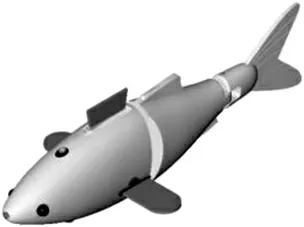
图1 仿生机器鱼
1.1 系统架构
仿生机器鱼通过模块化的设计,搭载了水质监测模块、鱼群探测模块及自主巡航模块等,实现了自动控制,满足了水质监测、集鱼等不同功能的需求。远程数据监控界面负责对仿生机器鱼获得的动态参数进行接收、评估和显示,见图2。
![]()
图2 水下机器人结构
1.2 工作原理
仿生机器鱼在装置启动前,须通过程序预设巡航深度、速度和终点,将其置于水中时即可启动工作模式。搭载的定位导航模块、深度模块与避障模块,通过预设程序指引航行方向、深度与速度,防生机器鱼启动后将自动、安全地向航线终点前进。定位导航模块将通过对定位信息与相对位置信息的判断,自动调整左右舵机输出,身尾三弹簧的形态分别调整胸鳍与尾的摆动,从而控制装置水下航行的姿态。仿生机器鱼同时搭载了多种传感器,以准确获得水质相关信息(pH值、温度、溶氧量等),进行初步评估后同步在上位机显示实时数据与评估结果。同时底部集鱼灯将配合摄像模块完成诱集鱼群与拍摄的任务,通过ROV线缆与无线通信技术,将数据与画面传输至上位机平台进行展示。
2 控制系统
仿生机器鱼以单片机为基础,其硬件设计分为主控制器、避障模块、定位导航模块,辅以相应的编程语言和传感器分别进行数据采集。
2.1 硬件部分
仿生机器鱼的控制系统主要基于Arduino UNO搭建而成,将Arduino UNO作为主控装置,同时配置了定位导航模块、深度模块与避障模块、动力源模块、传感器模块、摄像模块与LED集鱼灯模块。定位导航模块能够在保证较高精度的前提下使装置按照预设路径进行巡航;深度模块能够实时连接上位机同步上传装置所处深度;自动避障模块能够确定水下航行器前进路线是否存在障碍并自动避开障碍安全航行;传感器模块将对周围水环境进行简单测定,同步上传上位机,并在内置参数判断程序的提醒下,在水质不符合养殖标准时警告上位机系统;摄像模块分布在鱼头两侧,分别获得接近180°视野,组合后可以使水下航行视野盲区趋向最小;集鱼灯系统在鱼体下方安置2个,在鱼体上方安置1个,在航行中实现诱鱼集鱼功能。
2.1.1 定位导航模块
仿生机器鱼工作过程中的一大难点在于水下自主航位推算。运用捷联式惯性导航技术(INS)在水下进行定位和导航。捷联式定位导航较平台式INS占据的体积与空间小,且更容易将导航与控制集成于一体,通过加速度对时间的二次积分即可得到航行器位置。由于卫星信号无法穿透水体传递至仿生机器鱼,因此须通过线缆与仿生机器鱼进行连接,上位机也可通过CAN总线接收到仿生机器鱼的姿态、速度和位置等信息并显示出来。定位导航模块构成见图3。
![]()
图3 惯性导航模块硬件电路
2.1.2 LED集鱼灯的选取
传统集鱼灯主要为金卤灯,具有光线相对发散、能耗高、发热量大的缺点,而LED集鱼灯相较传统集鱼灯具有能耗低、指向性强、穿透性强的特点。赤点石斑鱼广泛分布于我国东南沿海,具有极高的经济价值,对绿色灯光(波长峰值分布于514 nm)兴趣较强。为确定后续使用的LED集鱼灯是否达标,对某绿色LED集鱼灯的光谱分布进行了测定,得到光谱分布曲线,见图4。灯光亮度为1 500 lm,色温为7 843 K,光谱范围主要集中在490~540 nm,峰值波长为524.6 nm,其光通量Φ=315.5 lm,光效为52.57 lm/W,辐射通量Φ为676.23 mW。经验证,符合理论使用标准。
![]()
图4 光谱分布
2.2 软件部分
软件部分主要包含CAN总线、串口通信、I/O接口控制、数据采集与处理、位置获取、深度控制和航行控制等。此仿生机器鱼的控制系统采取分布式控制,包含上位机平台和下位机两部分。GPS卫星定位模块采用串口通信方式接收当前位置参数并与设定的重点位置参数进行比对分析,传感器设定的程序可采集相应水质参数通过A/D转换传输给主控制器,主控制器接D/A模块与螺旋桨相连,控制螺旋桨转速与转动方向。采用INS捷联式惯性导航对仿生机器鱼定位导航需要进行解算,包括以下3个步骤。
(1)陀螺仪输出角度矩阵W,通过该矩阵得到仿生机器鱼姿态矩阵,在姿态矩阵基础上进行姿态解算得到姿态角;
(2)通过姿态矩阵将加速度计输出的f矩阵转换到导航坐标系中换算为速度信息f,即速度解算;
(3)对速度信息进行积分得到位置信息并更新显示,即位置解算。
通过上述流程得到的信息即为实时位置信息,导航定位解算思路具体见图5。
![]()
图5 捷联式惯性导航解算实现思路
3 试验
3.1 运动仿真
根据经验在捷联惯性导航误差仿真时选定合适参数:
(1)陀螺仪的噪声漂移拟定为0.01(°)/h;
(2)陀螺仪随机常值漂移拟定为0.1(°)/h;
(3)考虑一阶Markov过程,引入一阶Markov模型,陀螺仪一阶Markov飘移值拟定为0.1(°)/h;
(4)加速度计一阶Markov漂移拟定为1×10;
(5)一阶Markov过程用于描述低频随机误差特性,其离散表达式如式(1)所示。
![]()
式中:()为马尔科夫过程序列;T为相关时间,s,用以表征误差传递;△为单次采样时间间隔,s;w()为驱动白噪声,dB。T值较大时,Markov过程呈现类似角频率随机游走的低频特性,其取值通常在1 800 s至7 200 s。为进一步体现导航控制器性能,结合陀螺仪的低频随机角频率特性,故选取相关时间T=7 200 s。
仿真后得到的误差随时间变化函数见图6。由图6可见,在仿生机器鱼持续运动、惯性导航持续工作时间较短时其定位精度较高,误差被限制在0.5以内;误差随时间逐步累积,整体误差呈二次函数形式上升。由此得出水下机器人在工作过程中为保证其定位精度,持续运动时间需<700 s。
![]()
图6 捷联式惯性导航误差仿真
若要进一步提高仿生机器鱼的导航定位精度,可通过以下2种途径实现;一是修改软件定时,让仿生机器鱼上浮至水面附近,加装GPS,使之与捷联式惯性导航融合,以这样的方式校正定位;二是在仿生机器鱼定位导航系统中融入其余定位方式,结合Kalman滤波算法可减小对应误差。仅依靠单一导航方式无法实现持续工作状态下的精准定位。
3.2 水质数据采集实验
为测试仿生机器鱼能否在渔业养殖环境中完成水质监测,将仿生机器鱼置于校园湖泊内进行水下航行及水质相关参数采集试验。测量参数为pH值、温度与溶氧量,测试时间为23:00至次日01:00,天气为阴雨天,采用有缆通信的方式回传数据。预设深度值为0 m(水面)、0.5 m(静水层)和1.0 m(接近水底),水域温度、p H值及溶解氧监测数据见表1。表1为采样点不同深度的水质监测数值,由于在不同环境下传感器的温度补偿存在差异,造成6个样品小范围内的试验误差。
![]()
表1 水质监测数据
3.3 集鱼范围试验
试验所用LED集鱼灯(灯光亮度1 500 lm,色温7 843 K),在室温(24±0.1)℃、水温(20±0.1)℃、湿度25.2%、全黑吸光的环境下进行试验。测量所用特安斯牌数字照度计测量范围0~200 000 lx,准确度为±4%(读数误差),±10(数位分辩率)(<10 000 lx),厚度为(3.00±0.03)cm。
为确定该LED集鱼灯的水下诱鱼集鱼能力,设置测试环境为长300 cm、宽150 cm、高200 cm的钢化玻璃水缸,钢化玻璃厚度为2 cm,其中水深为100 cm。基于光谱辐射量试验,通过光在不同介质(空气、玻璃、去离子水)的辐射量,对比光照度衰减系数,可以测试出集鱼效果最佳的集鱼灯具。经试验测量以及数据拟合,该LED集鱼灯在水中的光衰减反映的照射距离()与照度()的关系为:=4 967.7。由于LED灯在水中形成的等光照度曲面接近于球体,因此可用球体体积的计算公式来估算诱集范围,计算结果见表2。
![]()
表2 集鱼灯诱集范围
由表2可知,LED绿光激光集鱼灯1x等光照度曲面所含包的水体积为2 447 m,最远照射距离为18.7 m,基本能够满足使用目的。使用Origin 2019 b软件绘制等值曲线,见图7。
![]()
图7 绿色LED集鱼灯的水中等照度曲线分布
经过测量,单个LED绿灯在0.1~10 lx,照度距离可达21.2 m,最远可达23.8 m。可见该配置下LED集鱼灯具有衰减较弱、诱集范围广和发光效率高等各种优势,在水下可以有效增加对鱼群的吸引范围,与该装置的使用目的完美契合。
4 结论
仿生鱼与集鱼灯装置组合而成的仿生机器鱼,在普通的水质监测机器人基础上进行升级,经试验在小规模饲养环境下效果良好。该机器鱼仿生了鲹科鱼类,能够避免水下航行对鱼群的惊扰,搭载的LED集鱼灯具有能耗低、指向性强、穿透性强的特点,集鱼灯可更换的特点,使指向性诱鱼成为可能。结果表明,在中小型水域内,该装置具有极强的实用性,在监测的灵活性和视觉监测上优于无人船、浮标等相关装置,可在不惊扰鱼群的前提下进行水质和鱼群视觉监测,科学化监测水产养殖情况。
在水产养殖实践中,将仿生鱼与集鱼灯结合,可提升饲养者对水质与鱼群的观测效率,从而为水产养殖行业带来便利。LED集鱼灯与仿生鱼结合的观测设备具有广泛的应用前景,但其研发工作仍处于起步阶段。
声明:本站属公益性没有商业目的的网站,上列文章仅供个人学习参考。本站所发布文章为原创的均标注作者或来源,未经授权不得转载,许可转载的请注明出处。本站所载文章除原创外均来源于网络,如有未注明出处或标注错误或侵犯了您的合法权益,请及时联系我们!
欢迎关注本站(可搜索)"养鱼E线"微信公众帐号和微信视频号"养鱼一线"以及头条号"水花鱼@渔人刘文俊"!